


案例来源|西咸影像中心
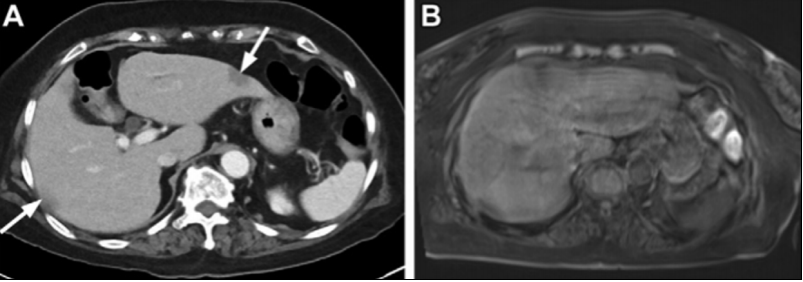
由于呼吸运动、肠蠕动和需要大體(tǐ)积覆盖,腹部 MRI 面临重大挑战。通常在多(duō)次屏息期间执行成像以避免运动伪影。上腹部器官的位置,特别是肝脏,在一个呼吸周期内变化可(kě)达几厘米。屏气失败可(kě)能(néng)会产生大量图像模糊,导致图像质量下降或图像配准错误,这可(kě)能(néng)会掩盖肝脏病灶。
运动抑制的常规方法
患者能(néng)够合作,通常持续 10-20 秒(miǎo)的屏气是避免呼吸运动引起影响的最简单方法。一般来说,由于其短的重复时间和小(xiǎo)的翻转角度,GRE 成像比快速自旋回波或涡轮自旋回波成像更快。3D-T1 加权 GRE 图像可(kě)以在 10-20 秒(miǎo)的量级上获得,并具有(yǒu)平行成像加速度,图像通常在冻结呼吸期间采集。使用(yòng) turbo 自旋回波序列对整个腹部进行多(duō)节段二维 T2 加权成像可(kě)能(néng)需要几分(fēn)钟,并且可(kě)能(néng)可(kě)在多(duō)次屏息、多(duō)次平均自由呼吸或呼吸触发的情况下进行。為(wèi)了缩短屏气时间,通常必须牺牲空间分(fēn)辨率和體(tǐ)积覆盖率。通过呼吸触发或门控技术,患者可(kě)以在 MRI 检查期间正常呼吸,并且可(kě)以在呼吸周期的同一阶段收集数据(触发),或者连续采集数据,然后进行回顾性选择(门控)。然而,这显著延長(cháng)了总成像时间,并且与所有(yǒu)成像研究(如DCE MRI)不兼容。这种采集方案在具有(yǒu)高度不规则呼吸模式的患者中也可(kě)能(néng)不可(kě)靠。与呼吸触发一样,导航技术通过射频脉冲跟踪肺 - 肝界面,前瞻性地协调呼吸周期的特定阶段和 MRI 数据收集。导航仪回波脉冲可(kě)能(néng)会受到射频场畸变的负面影响,并且还会在较高磁场强度下增加射频沉积,从而与来自肝脏的信号产生干扰。
加速成像技术
加速或快速 MRI 技术,如并行采集成像或压缩传感(CS),可(kě)以加速 MRI 数据采集。还应注意的是,尽管快速成像本身不是运动管理(lǐ)的方法,但它可(kě)以通过缩短图像采集时间,从而改善图像质量。
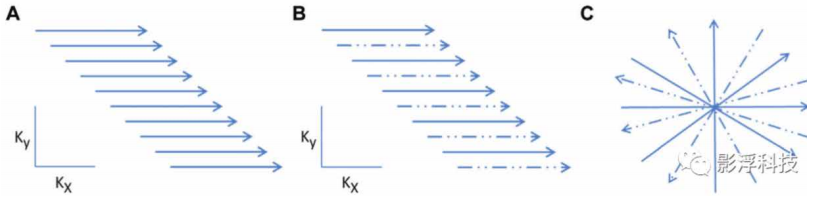
(A)传统的 k 空间,(B)有(yǒu)限的 k 空间(并行或压缩传感),和(C)径向成像。虚線(xiàn)表示稀疏采样。
并行采集成像是一种最广泛用(yòng)于加速 MRI 数据采集的技术,使用(yòng)具有(yǒu)空间变化灵敏度的接收器線(xiàn)圈阵列。多(duō)線(xiàn)圈阵列允许MRI 信号的同时编码,因此允许以规则间隔减少相位编码步骤的数量。并行采集成像的主要限制是信噪比(SNR)降低和高加速因子下的严重噪声放大。
运动鲁棒MRI采集
除了传统方法外,运动鲁棒 MRI 的新(xīn)技术包括非笛卡尔 MRI 采集和基于人工智能(néng)(AI)的技术(T-able)。不同的非笛卡尔 MRI 采集方案已被证明能(néng)够实现运动鲁棒 MRI 检查,这可(kě)以在自由呼吸期间进行。例如,径向 k 空间采样沿着在 k 空间中心彼此交叉的旋转辐条收集数据。中心 k 空间在径向成像中重复采样,导致运动平均采集。这在运动鲁棒性方面优于笛卡尔成像技术。此外,通过径向采样,每个辐条具有(yǒu)不同的读出方向,运动伪影表现為(wèi)轻微的模糊或径向条纹。与笛卡尔欠采样伪影相比,这些条纹伪影更加分(fēn)散,并且在临床应用(yòng)中可(kě)以更加耐受。然而,值得注意的是,广泛运动仍可(kě)能(néng)导致径向成像(径向轨迹条纹)的模糊和混叠伪影。径向成像提供了自由呼吸数据采集的潜力,但与相同采集参数的笛卡尔采集相比,它具有(yǒu)图像采集时间長(cháng)的缺点。
基于人工智能(néng)的图像质量改善方法
临床成像中的人工智能(néng)在图像分(fēn)类、分(fēn)割、超分(fēn)辨率和图像重建方面取得了突破。研究表明,人工智能(néng)方法可(kě)用(yòng)于去除伪影,包括残余运动伪影,以改善图像质量。深度學(xué)习(DL)是一种机器學(xué)习方法,它依赖于具有(yǒu)许多(duō)隐藏层的神经网络。卷积神经网络可(kě)以在 k 空间域中应用(yòng)以填充丢失的 k 空间数据(在执行傅立叶变换之前),或者在执行傅里叶变换之后在图像空间中应用(yòng)以去除混叠伪影。监督训练通常使用(yòng)高质量参考图像进行,输入是相应的欠采样 k 空间数据或图像。在完成特定应用(yòng)的卷积神经网络训练后,经训练的神经网络可(kě)用(yòng)于重建以相同欠采样模式采集的新(xīn)图像,从而减少各种条纹和混叠伪影,并大幅提高图像质量。
欠采样 MRI 数据的重建也為(wèi)快速 MRI 的进一步改进提供了机会。人工智能(néng)支持快速成像 - 与传统的快速成像技术相比,基于DL 的重建使用(yòng)数据驱动的方法来表征成像特征,并通过从大型图像数据库中推断特征来消除欠采样伪影。在单次屏息中采集了大约三分(fēn)之一的数据。这导致更好的图像质量,减少了模糊伪影。使用(yòng) DL 半傅立叶采集单镜头涡轮自旋回波序列的图像重建采用(yòng)了由数据一致性层和正则化组成的网络。DL 重建中使用(yòng)的正则化是数据驱动的这意味着它们被专门训练以重建所需类型的图像。这些经过训练的正则化器在去噪和校正混叠伪影方面可(kě)能(néng)优于常规迭代重建方法。虽然 DL 需要大量时间进行初始训练,但推理(lǐ)比传统迭代重建方法更快。
人工智能(néng)技术的挑战
各种 DL 技术的挑战之一是其通用(yòng)性。当这些方法应用(yòng)于初始训练中未包括的数据(例如,来自不同扫描仪和患者群體(tǐ))时,这些方法的性能(néng)将如何仍有(yǒu)待研究。DL 技术还需要在更大的患者队列(希望在多(duō)中心试验中)的诊断性能(néng)方面进行验证。越来越多(duō)的文(wén)献记录了 DL 方法引入的伪影,例如带状或条纹伪影,或 DL 重建不稳定性。图像和采样域中的微小(xiǎo)变化会导致大量不同的伪影,这对于不同的训练网络来说是不可(kě)预测的。
结论
总之,我们简要讨论了克服腹盆腔 MRI 运动相关挑战的各种方法。这些包括用(yòng)于加速成像的方法,如高级并行成像、基于 CS 和 DL 的方法,以及自由呼吸方法,如非笛卡尔成像。这些方法可(kě)以协同结合,以改善呼吸运动的管理(lǐ)。例如,运动鲁棒采集可(kě)以与加速度方法相结合,以提高成像性能(néng)。此外,基于人工智能(néng)的方法可(kě)以与其他(tā)运动管理(lǐ)策略相结合,以实现对所有(yǒu)患者的腹部进行稳健和诊断性成像


地址:北京市朝阳區(qū)民(mín)族园路民(mín)族园2号2幢
联系热線(xiàn):010-82240501
患者咨询热線(xiàn):400-666-6073




Copyright © 江西一脉阳光集团 All Rights Reserved
